PROBLEM STATEMENT
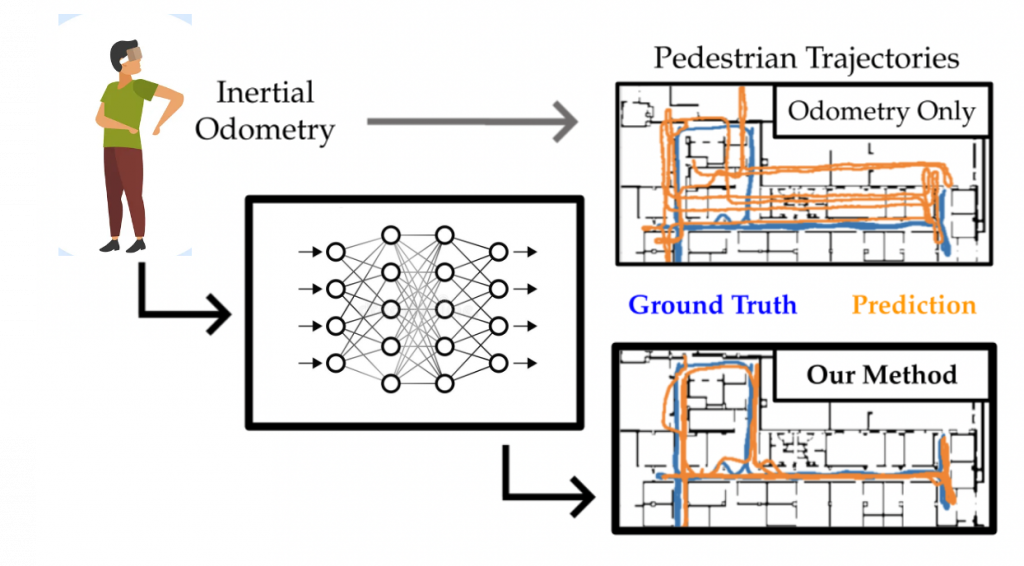
Our task is to develop a low-power state estimation algorithm for Aria glasses using a history of Inertial Measurement Unit (IMU) measurements combined with a sparse number of RGB images as input.
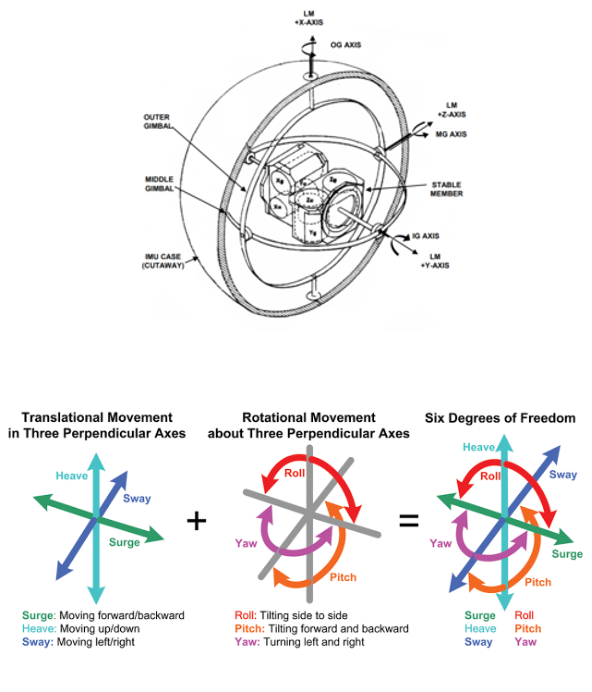
IMUs SUMMARY
The IMU is a combination of the accelerometer, gyroscope, and magnetometer sensors. The accelerometer sensor measures the linear acceleration while the gyroscope measures the angular velocity. The magnetometer measures the magnetic flux density, which is just a combination of magnetic field strength and direction.
Each of the 3 sensors takes measurements in the 3 axes relative to the device.
OUR HYPOTHESIS
Fusing the camera’s relative pose with the inertial sensor measurements can increase the accuracy and robustness of the state estimates when compared with inertial-only methods such as IDOL with just a small increase in power consumption.