
Dataset
GRAB

- We utilize the GRAB dataset, featuring whole-body grasping sequences from 10 subjects interacting with 51 objects through 29 actions.
- Our method is evaluated in both seen action and novel action settings.
Quantitative Result
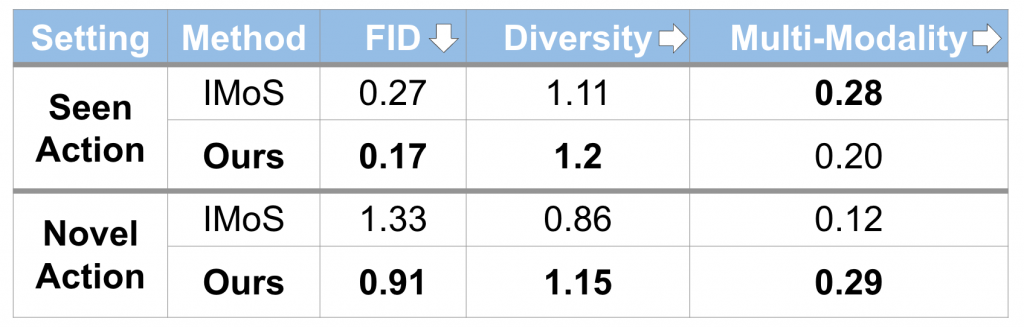
- FID: FID evaluates the naturalness of generated motions using the Fréchet Inception Distance
- Diversity: Diversity measures the variance of the generated motions across all action categories
- Multi-Modality: Multi-modality measures how much the generated motions diversify within each action type
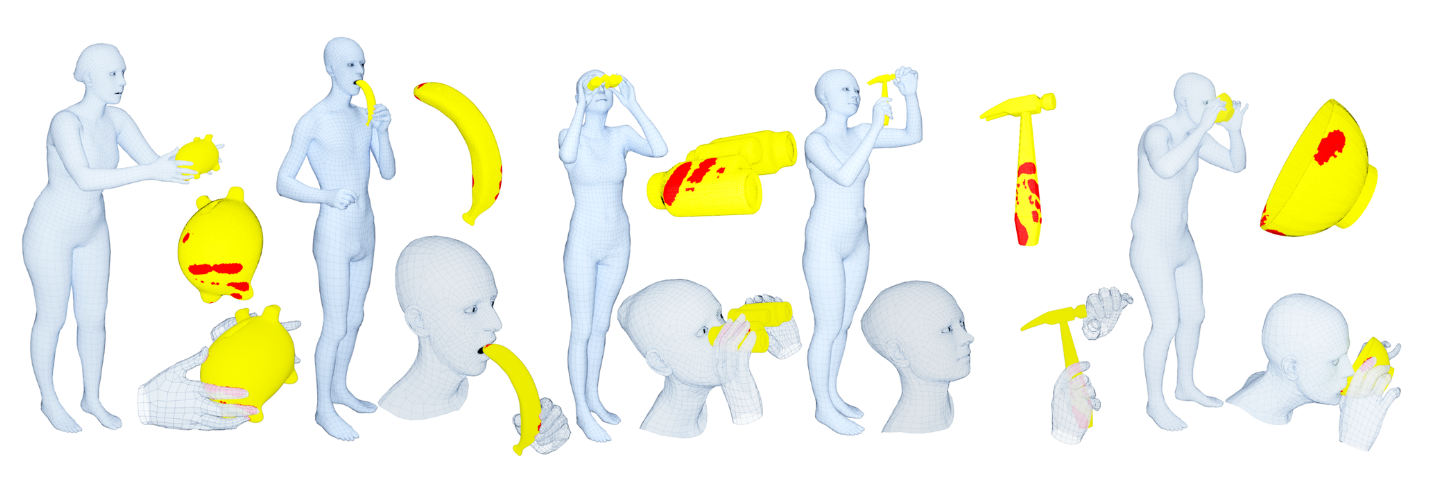
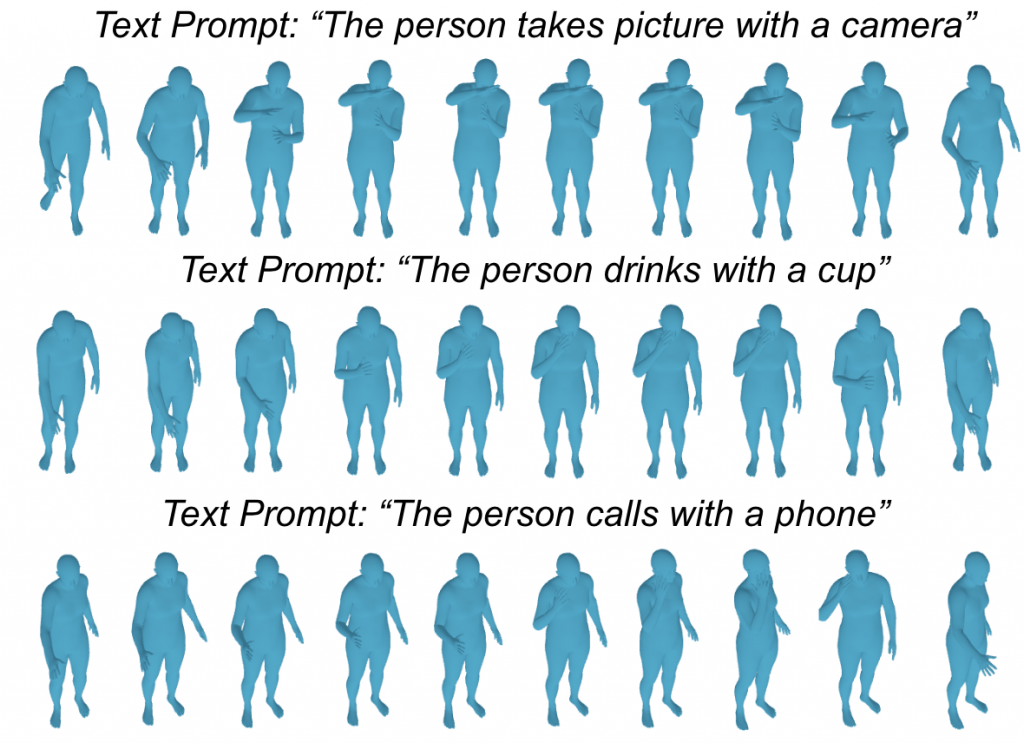
Qualitative Result
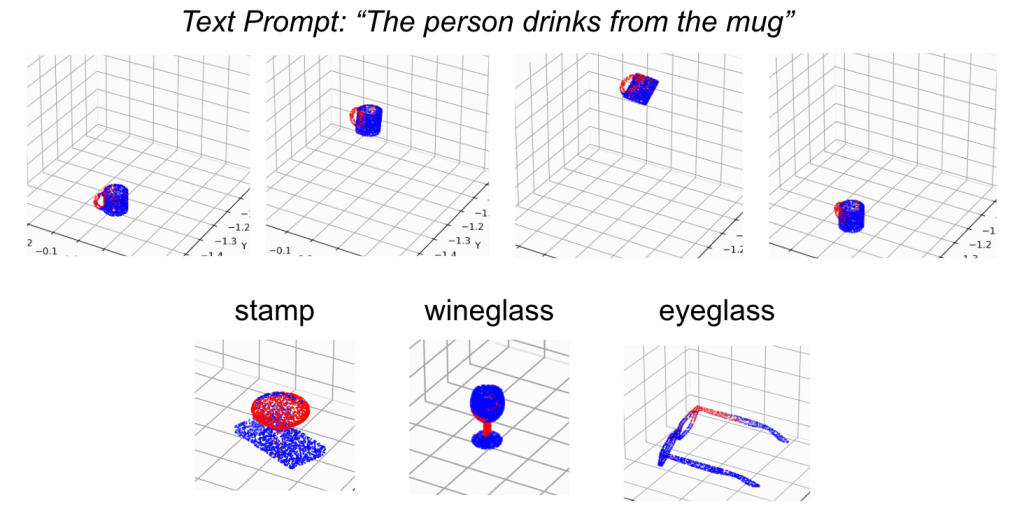
Qualitative Result for Contactnet of Hand-Object Contactness Module
* Some modules of this work are not fully finished, so their results are not shown here. We are targeting to finish and publish this work, and the remaining results are expected to be shown in the paper.