Students: Long Vân Tran Ha, Hewei Wang, Jinjiang You | Advisors: Ioannis Gkioulekas (CMU), Shubham Garg (Meta Reality Labs), Wei Pu (Meta Reality Labs)
About
Overview
Build an automated calibration system based on an efficient Structure-from-Motion (SfM) pipeline to estimate intrinsic camera parameters.
Enhance accuracy by applying featuremetricrefinement to detected keypoints and triangulated 3D points.
Incorporate known ground-truth extrinsic in order to refine intrinsic estimates.
Background
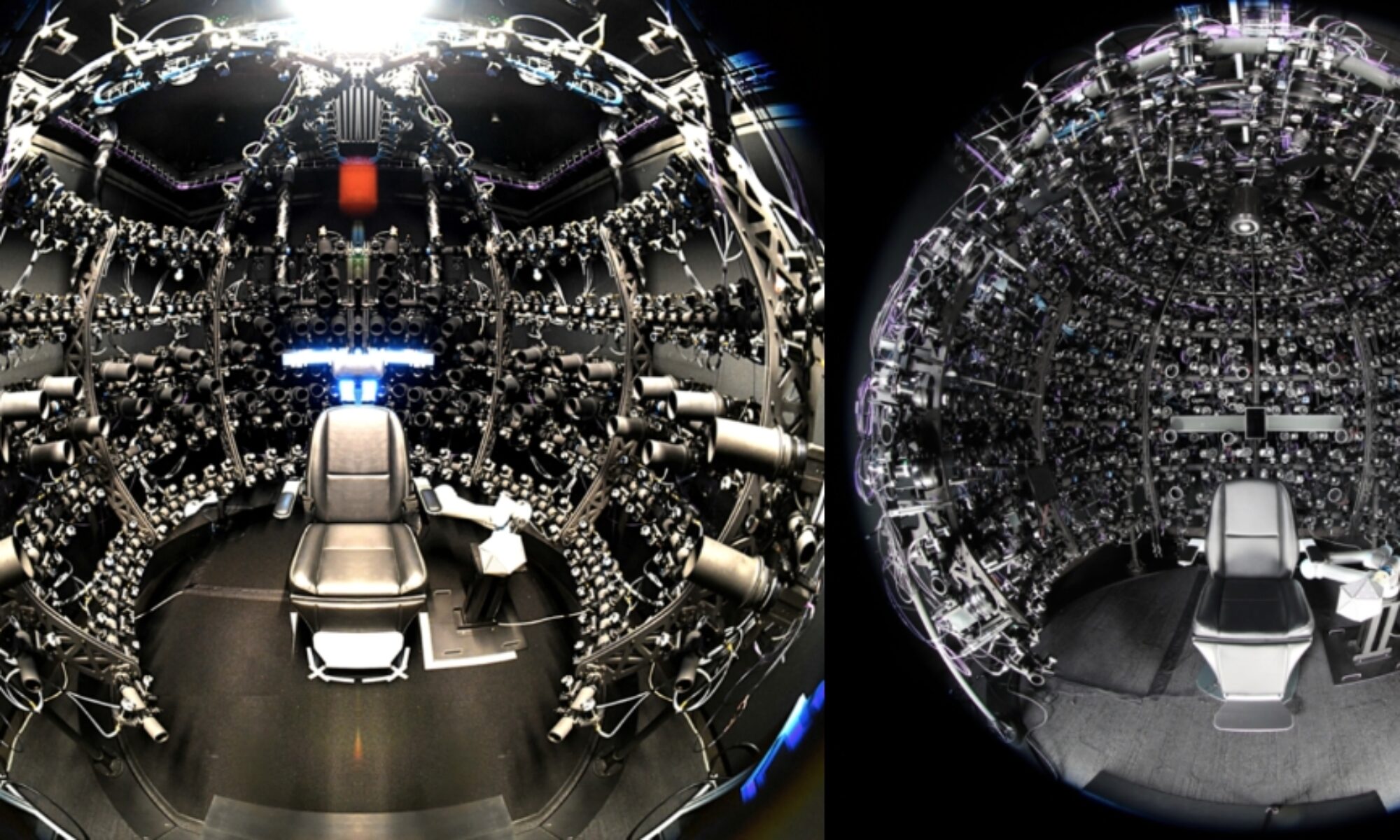
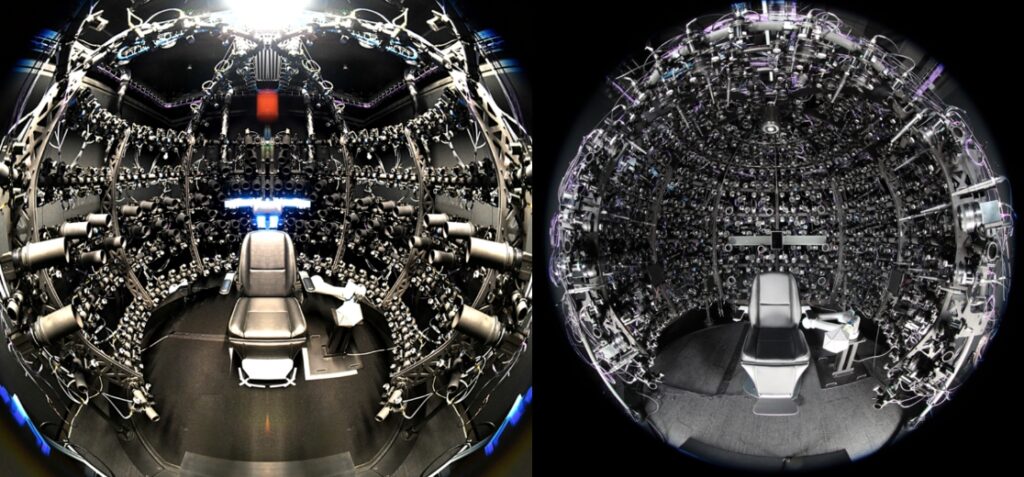
Human face data captured by hundreds of cameras across hundreds of frames require precise calibration.
Extrinsics remain stable over a short period (e.g. 1 day ~ 1 week).
Intrinsics fluctuate frequently due to environmental factors.
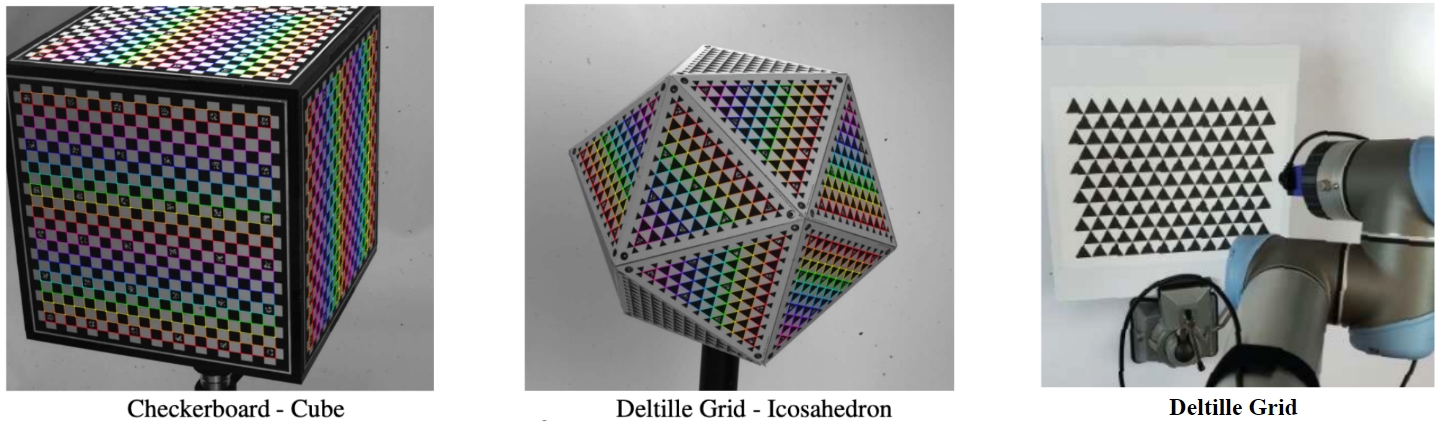
Traditional calibration using regular patterns achieves high precision but demands an additional capture process, which is time-consuming and inefficient.
An efficient SfM pipeline is proposed to directly calibrate cameras using human face data, aligning with the system’s ultimate purpose of facial data capture.
Dataset
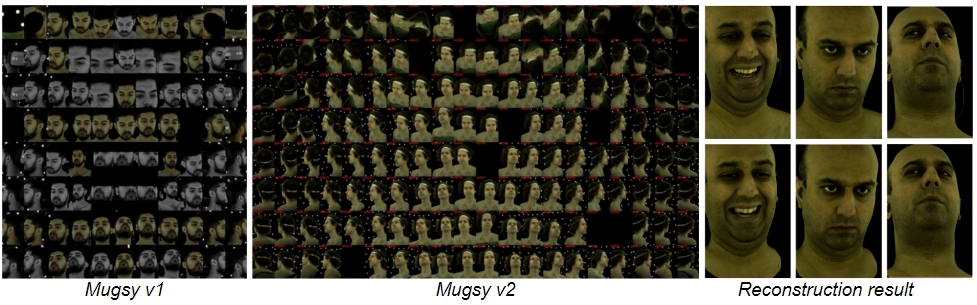
The Multiface dataset from Meta Reality Labs is used for our calibration process. This dataset is designed for large-scale multi-view codec avatar tasks, particularly neural face rendering.
The dataset includes 10+identities recorded with various facial expressions, raw images, tracked meshes, unwrapped textures, headposes, phonetically balanced sentences for each identity, and ground-truth camera parameters.