Important links
Spring Presentation slides
https://docs.google.com/presentation/d/1Qyq_EHMxuz5Mnm6UY2Pt8GjWNu-vAqSbMBVzQySh0Go
Spring Presentation video
https://drive.google.com/file/d/1a4smV3DKota_uJUdCWi6pGwwjMb-NlmG/view?usp=sharing
Description
The bulk of the Spring semester was spent in Literature surveys. We looked at a bunch of papers and went back and forth with our advisor and sponsors to finalize the problem description. We decided to look at the problem of SLAM as a graph-based non-linear least squares optimization problem:
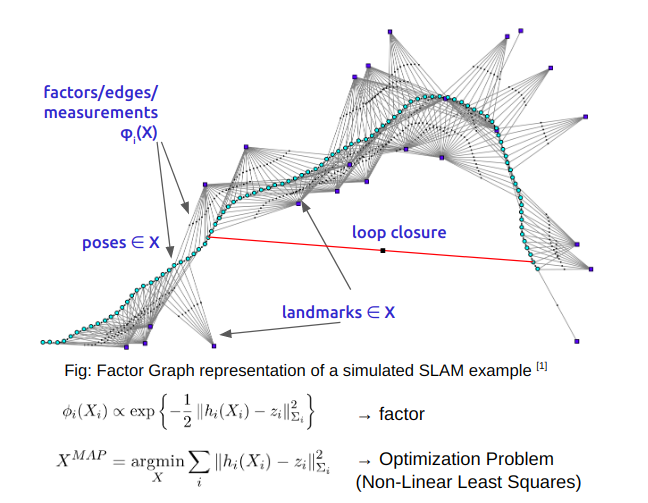
Dellaert, Frank, and Michael Kaess. “Factor graphs for robot perception.” Foundations and Trends® in Robotics 6.1-2 (2017): 1-139.”
We finally decided the setting we wanted to assume was RGBD sensors and a sparse point cloud. Hence we decided to base the method on ORB-SLAM2, a state of the art method for RGBD video and sparse cloud representation with no GPU support for semantic maps.
There were a lot of intial experiments we conducted using a ZED camera at our home to determine the performance of ORBSLAM2 with respect to relocalization and map maintenance. We included some qualitative and quantitative analysis in the presentation.
We attempted to integrate wheel odometry with ORB-SLAM2 by adding the wheel encoder measurements as an additional factor in the back-end optimization problem. This can help in tracking despite having textureless surfaces. However, after spending a lot of time on this, we switched to other approaches as the sponsors were not as interested in this direction. Link to visualization: https://drive.google.com/file/d/1Nk4CcPvMcFuQtTMa0Rb_XMZjmv2DSc_9/view?usp=sharing
The second experiment was a relocalization experiment. We first used the openLORIS dataset to extract pairs of frames for relocalization along with their ground truth relative pose. This was used to design a simple experiment of the relocalization performance of the PnP+RANSAC method. We compared the performance of PnP with and without using semantic maps. We found some results which are in the presentation. The updated results and discussion can be seen in out Fall semester page [here].