Results
Full Videos
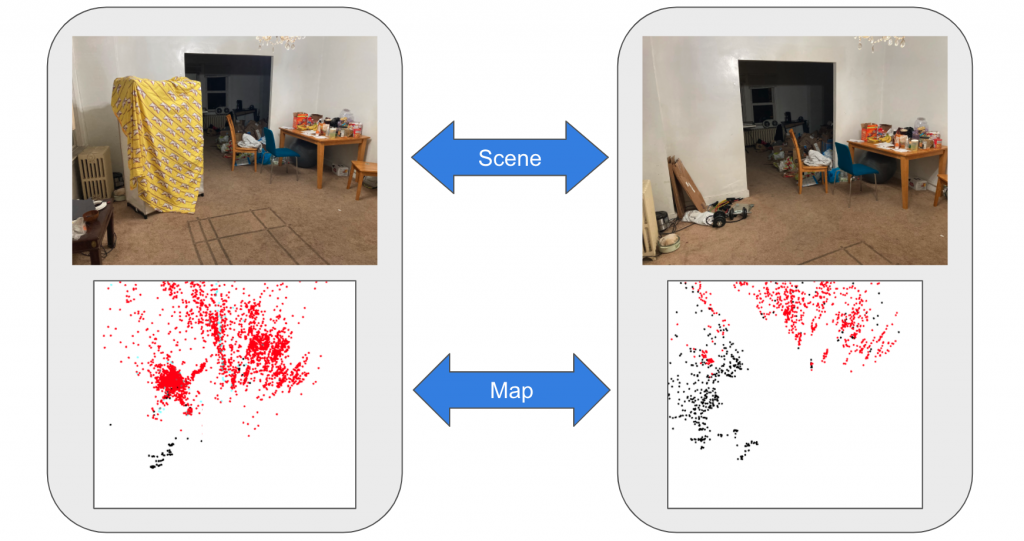
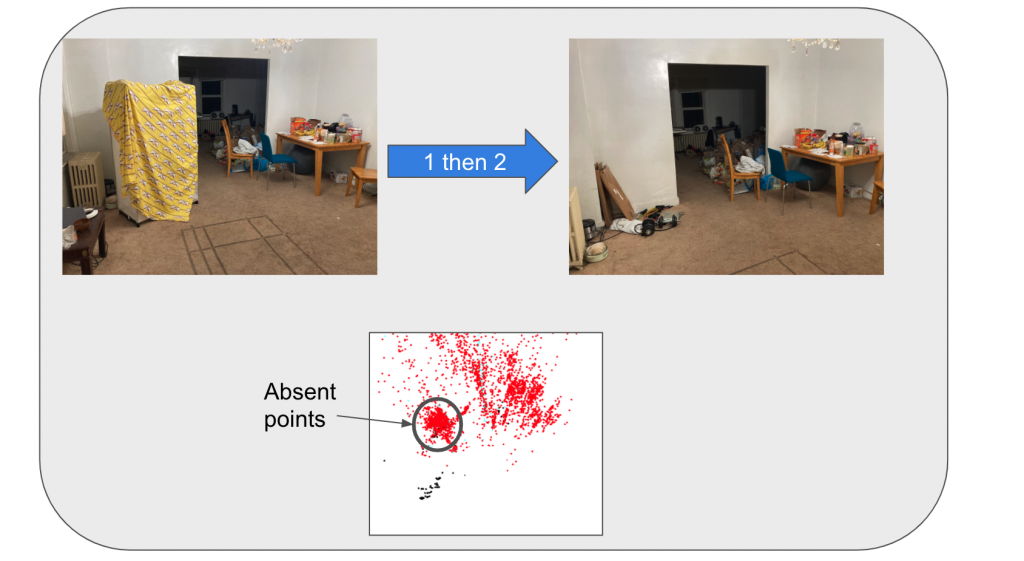
Both the following videos perform SLAM on the same three sequences, the first one performs depth based pruning, the second video does not. We will find that a lot of points are marked green. These are the point which will be deleted in the end. The quantitative analysis is provided below
Quantitative Results
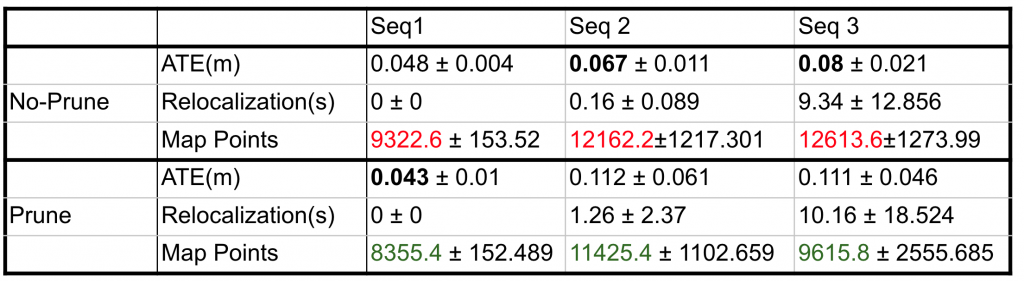
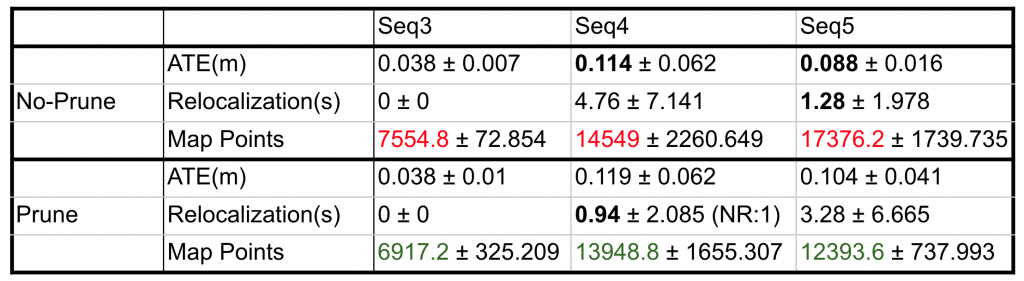
These are the results for the two sets of three sequences. We find that the depth based pruning proves to be much more scaleable. The reason is that the number of points increase slowly. The ATE also does not decrease by a very significant margin