Setup
Given trajectories of multiple passes from a scene, we collect pairs of frames which are close in the world coordinate system:
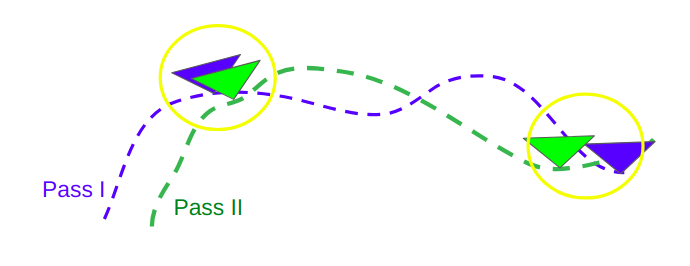
Compared to brute-force based matching, semantic map based matching will only take correspondendences which belong to same semantic category in both the images.
Quantitative Results
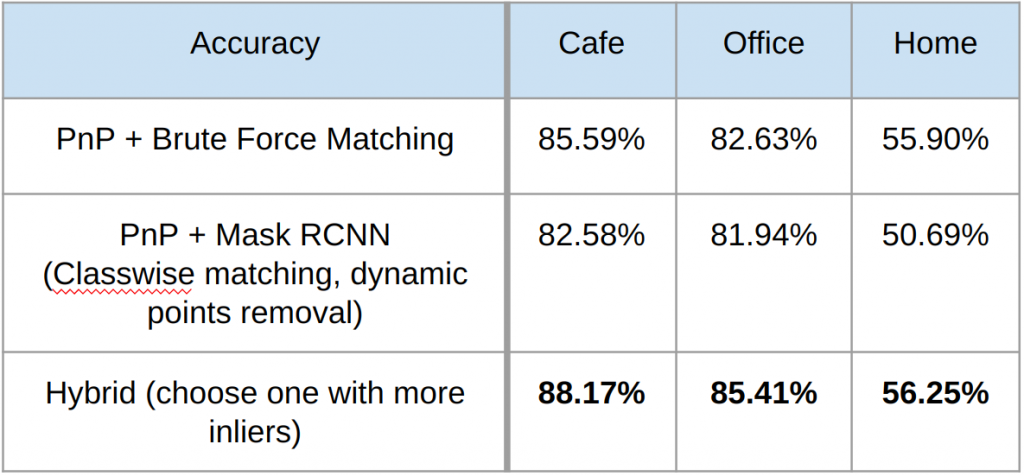
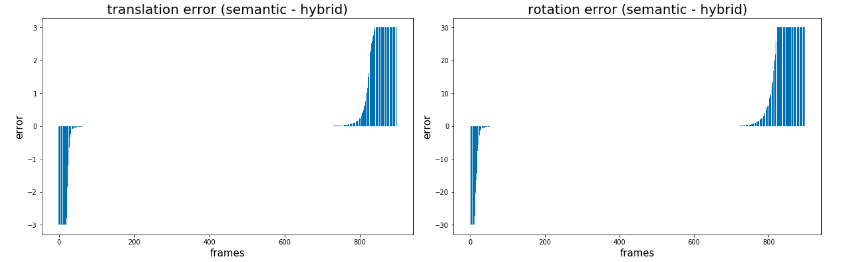
We see that the brute force approach outperforms the semantic map based approach, however, the error both the approaches make seem to be complimentary:
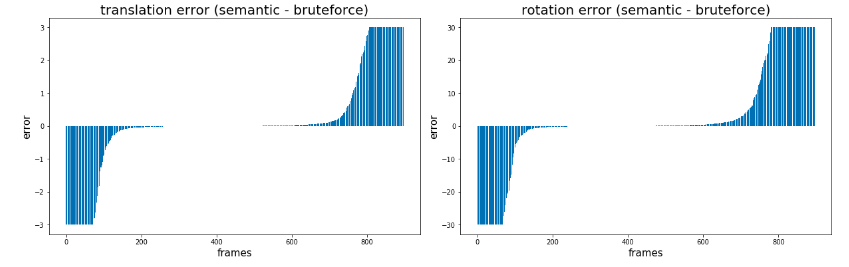
Therefore, we try out a hybrid approach, where both methods are used, and number of inliers is used to choose one between them. Figure below shows that it does improve the performance, but as evident in Table 1, that improvement is not very high.
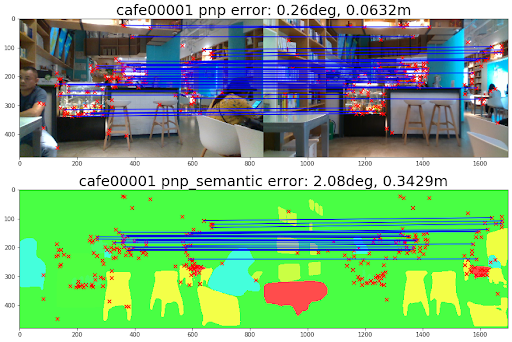
Qualitative Results
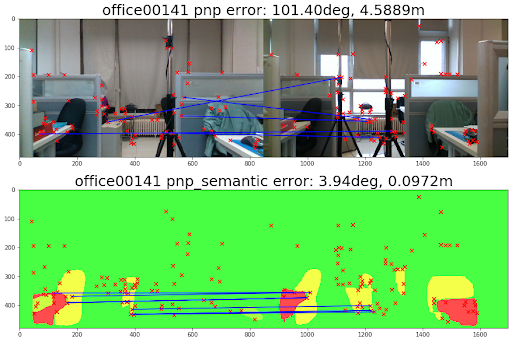
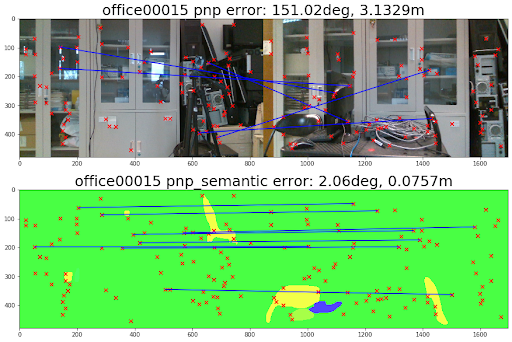
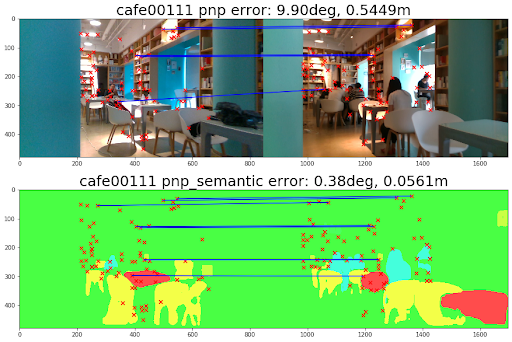
The qualitative results below show a pair of images in RGB and in semantic-map format. The matches are done on RGB features, but semantic maps were used to guide them, so that’s why we show the semantic maps in (ii) approach. Translation and rotation errors are written for all cases.
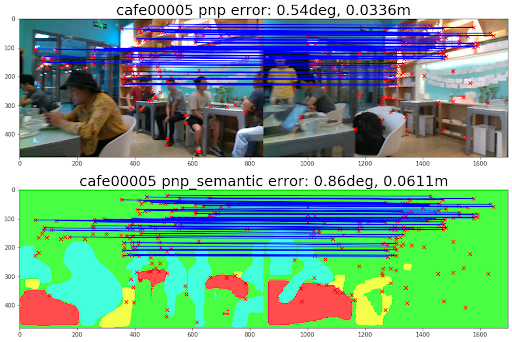
A: Semantic maps performing better than brute force approach:
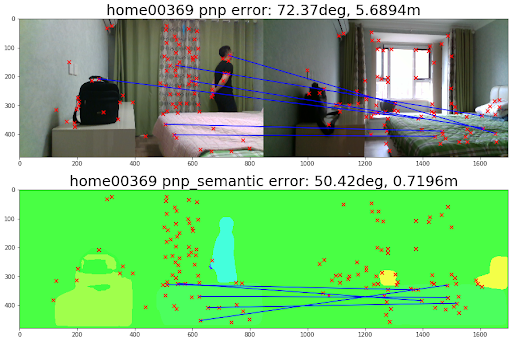
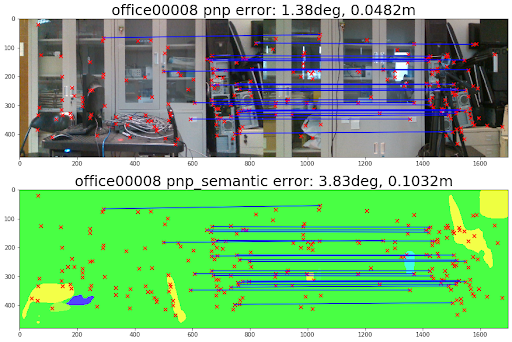
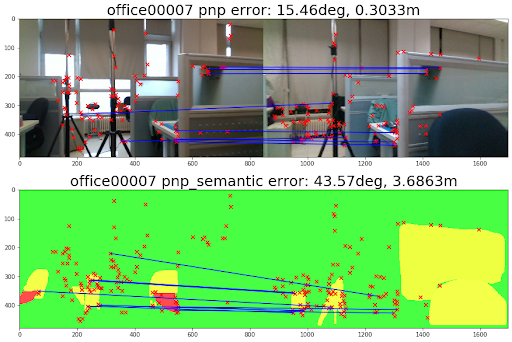
B: Brute force approach performing better: