In this project, we aim to achieve the paradigm of Tracking Any Object with Amodal perception (TAO-Amodal)
This project has been wrapped up into a publication. Details could be found in our Project Page.
Tracking Any Object with Amodal Perception

Amodal perception, the ability to comprehend complete object structures from partial visibility, is a fundamental skill, even for infants. Its significance extends to applications like autonomous driving, where a clear understanding of heavily occluded objects is essential. However, modern detection and tracking algorithms often overlook this critical capability, perhaps due to the prevalence of modal annotations in most datasets.
Traditional Tracking vs. Amodal Tracking

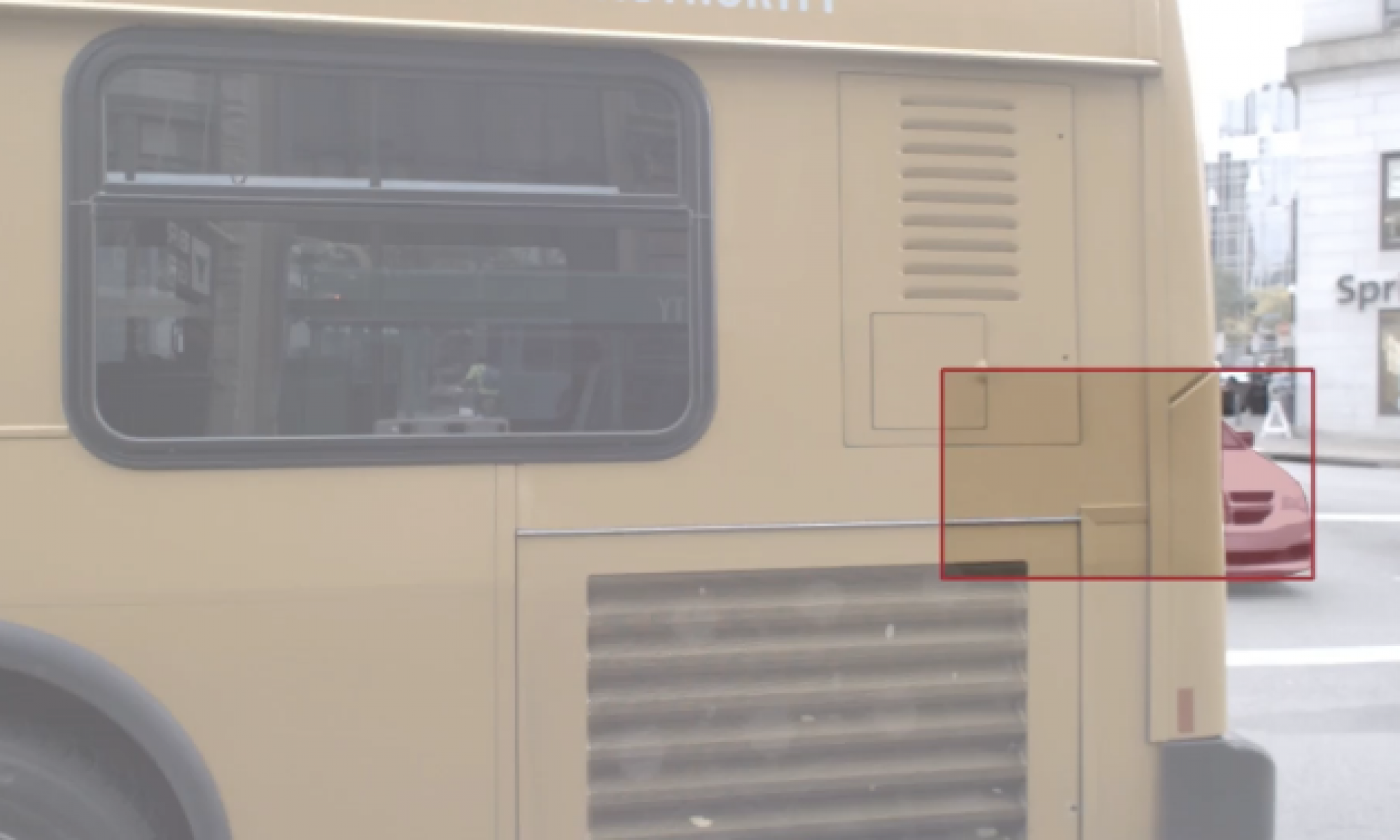
Traditional perception (top) concentrates on identifying visible segments. Consequently, they face peculiar outputs such as vanishing bounding boxes or tiny box sizes under occlusion scenarios.
Amodal perception (bottom) advances beyond conventional approaches by inferring complete object boundaries, even when certain portions are occluded.
How to Achieve Amodal Perception?
Please refer to our Method Section.