This project aims to reduce the fuzziness in point clouds generated by low-cost lidars by using priors and potentially adding imagers to the ranging measurements. The goal is to improve the fidelity of reconstructions while maintaining the compact and affordable form factor of the lidar devices.
Motivation
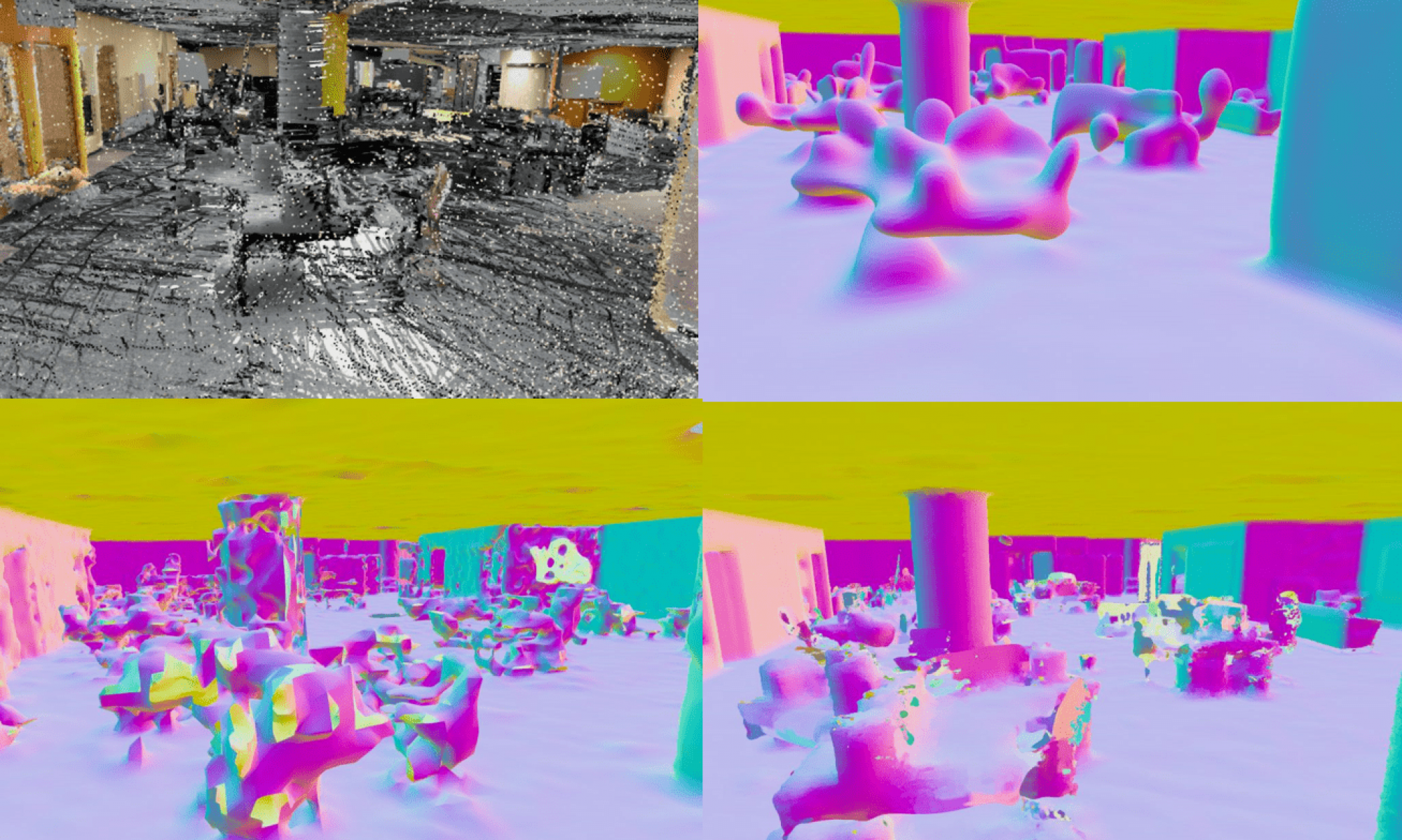
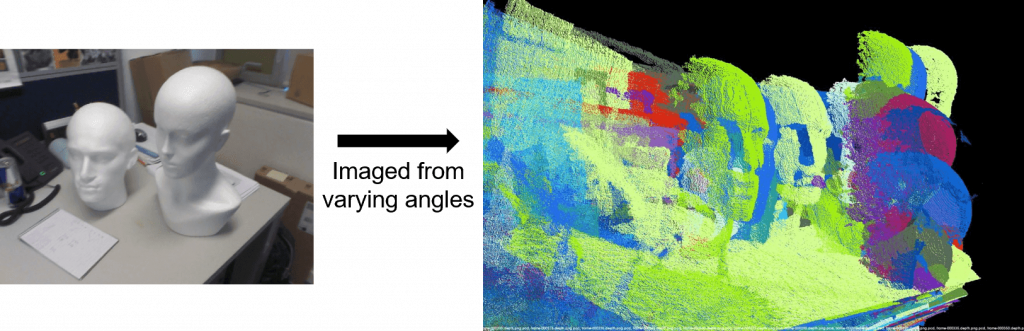
Commercial lidars like the Velodyne Puck create a large number of range from small, compact, and relatively inexpensive form factors. The resulting point clouds are fuzzy, however, because even small patches in the environment are imaged from varying angles. In this project, our aim is to reconstruct high quality 3D mesh from fuzzy point cloud. High quality reconstruction of large-scale environments will become an essential building block of many indoor and outdoor autonomous systems.
Description
Commercial lidars like the Velodyne Puck create a large number of range measurements — as many as 1 million/second — from small, compact, and relatively inexpensive form factors. The resulting point clouds are fuzzy, however, because even small patches in the environment are imaged from varying angles. To obtain sharper point clouds one may resort to more precise devices, but they tend to be larger, heavier, and more expensive, making it harder to incorporate them in robotic systems.
In our project, we first utilized point cloud registration algorithms to align the point cloud, reducing the fuzziness. Additionally, we delved into various methodologies to reconstruct 3D surfaces with a focus on attaining high-quality results.