
Students
Neha Boloor

Neha Boloor is a graduate student pursuing Masters in Computer Vision at the Robotics Institute, Carnegie Mellon University graduating in the December of 2022. She interned at a startup called Matician, where they build house-cleaning robots, over the Summer of 2022 where she worked as part of the perception team. Prior to the graduate studies, she worked as an Applications Engineer and Senior Software Engineer at Oracle India between 2018-2021. In 2017, she worked under the guidance of Prof. Anurag Mittal at the Computer Vision Lab, Indian Institute of Technology Madras, India where she worked on Content-based Image Retrieval using Object Detection Networks.
Shefali Srivastava

Shefali is a graduate student in the Robotics Institute at Carnegie Mellon University pursuing Master’s in Computer Vision, graduating in December 2022. From 2018-2021, she worked at Adobe Systems as a software developer. Her work primarily involved designing components for the Adobe Experience Platform to aid research in customer profiles. In 2017, she worked under the supervision of Dr. Suchendra M. Bhandarkar in the Visual and Parallel Computing lab at The University of Georgia where she worked on Image Correspondences and Template Matching. She recently interned with the Perception and Manipulation team at Amazon Robotics where she worked on the problem of state estimation and multi-object tracking for amazon packages in an automated warehouse facility. Her research interests lie at the intersection of tradition Computer Vision and Deep Learning based Vision research.
Project Responsibility
Semester 1: We explored the various datasets relevant for the task like– WALT, LVIS, nuScenes, ACID, RoadBotics, ArgoVerse2. Neha primarily worked on integrating LVIS model with the existing live-camera pipeline and setting up the heuristics based pipeline setup for baseline construction zone detection, while Shefali worked on exploring the details of nuScenes, ACID and Argoverse2 datasets and setting up the training pipeline. She is currently working to train a 2D object detector on construction-zone relevant classes of nuScenes.
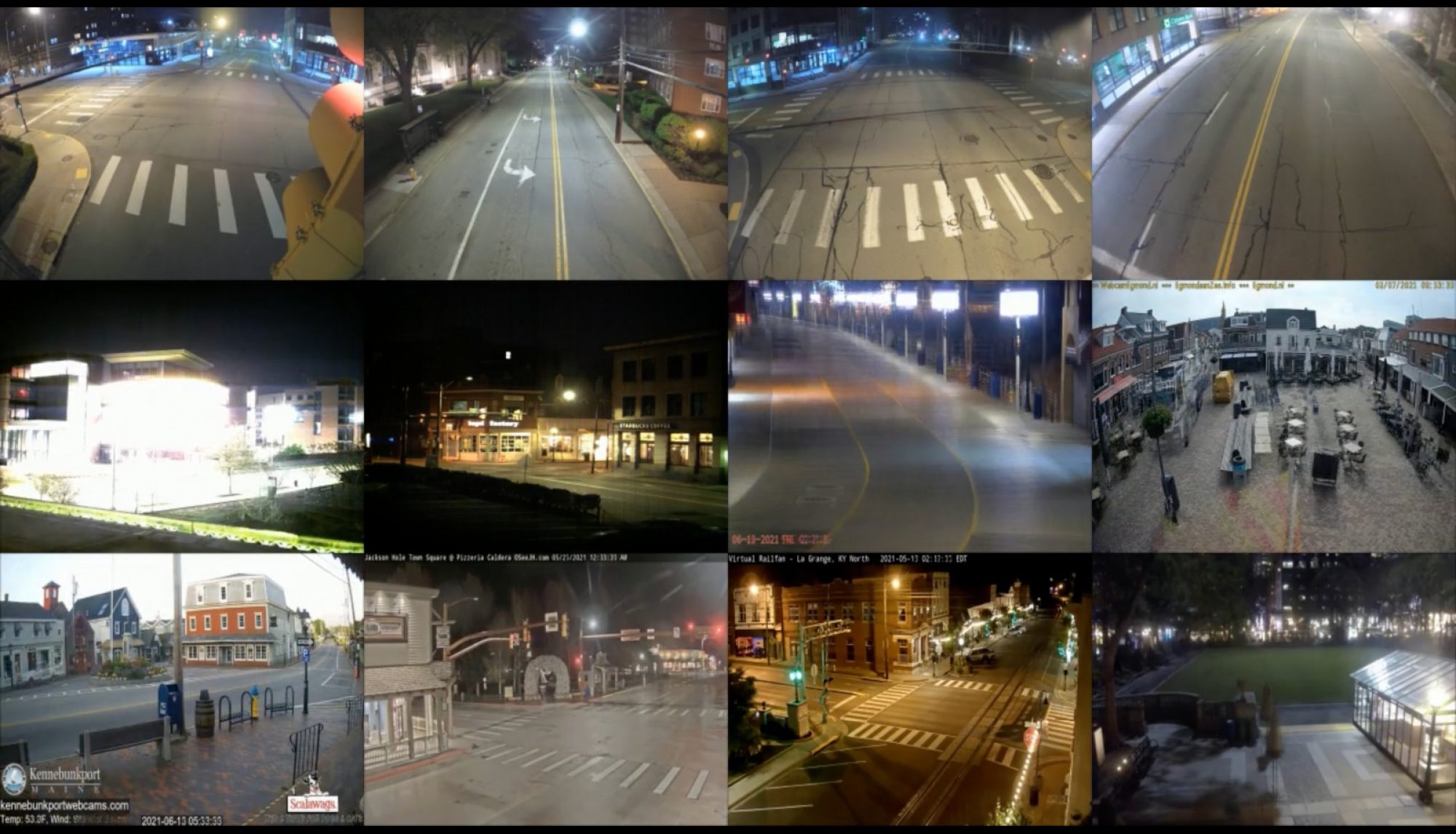
Semester 2: Over the Summer and beyond combined efforts went into collection and annotation of work-zone relevant data in the ILIM lab. So we targeted to work with this data. Neha primarily worked on analysing the data distribution and further working on the data augmentation approaches to get 2D Clip-and-paste augmentations and defining the final stage of the pipeline, the heuristics based work-zone classifier, while Shefali worked on training of the deep-learning based instance segmentation network with the annotated as well as augmented dataset, analyzing and performing comparative analysis for areas of improvement and further enhancing and improving model performance. In collaboration with other members of the lab, we explored the 3D mixed reality based data augmentation for the purpose of this project as well.
Advisors
Prof. Srinivasa Narasimhan

Srinivasa Narasimhan is a Professor of the Robotics Institute at Carnegie Mellon University. He served as Interim Director of the RI from Aug 2019 to Dec 2021. He obtained his PhD from Columbia University in Dec 2003. His group focuses on novel techniques for imaging and illumination to enable applications in vision, graphics, robotics, agriculture, intelligent transportation and medical imaging. His works have received a dozen Best Paper or Best Demo or Honorable mention awards at major conferences [IV (2021), ICCV (2013), CVPR (2019, 2015, 2000), ICCP (2020, 2015, 2012), I3D (2013), CVPR/ICCV Workshops (2007, 2009)].
N Dinesh Reddy
Dinesh Reddy is a PhD candidate at Robotic Institute, School of Computer Science, Carnegie Mellon University under the supervision of Prof. Srinivasa Narasimhan. His research theme lies in combining learning based methods with 3D Computer Vision. Currently, he is focusing on developing robust computer vision algorithms in severe occlusions. His research has been recognized with a Best paper award at 2021 IEEE IVS, a Amazon Go PHD Fellowship and a 2021 PHD Qualcomm Innovation Fellowship.