
We leverage the sparse 3D reconstruction obtained by pose estimation and camera poses for computing dense 3D reconstruction of the scene
We leverage to the concept of Multi-view stereo to augment number of 3D points in the sparse 3D points generated by SfM pipeline
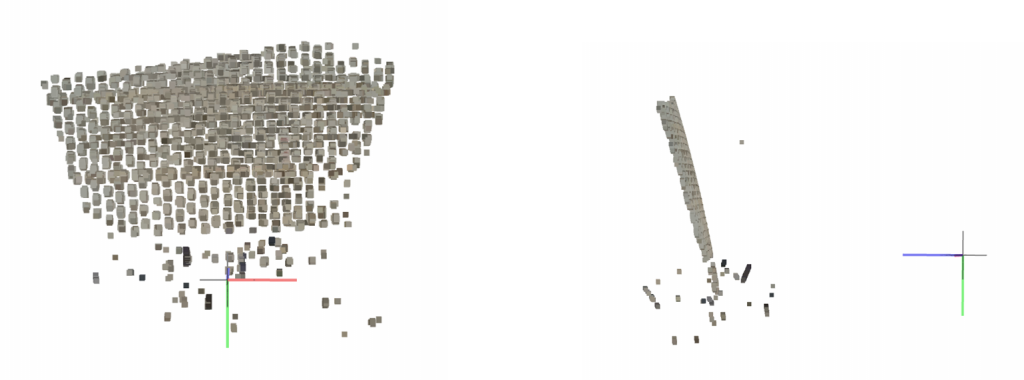
Results
Note:
As we can see there is slight curvature and tilt in the 3D reconstruction of the wall, this can be attributed to the radial and tangential distortion still present in the image after un-distortion. We need better parameters to estimate the radial and tangential distortion to eliminate this undesired effects.
| Num of 3D points in Sparse 3D from SfM | 1767 |
| Num points 3D in Dense reconstruction | 15676 |