Enabling Unmanned Aircraft Systems to execute a collision-free trajectory and land safely without operator intervention in case of an emergency requires much effort. In this capstone project, we demonstrate a stable system to generate a prior risk map for aerial drones ladning in Pittsburgh area. This system uses point cloud data as well as RGB images if available to do semantic segmentation on geometric map. It can deal with large scale data in reasonable time without supervised learning data. The quality of this system is proved to be reliable.
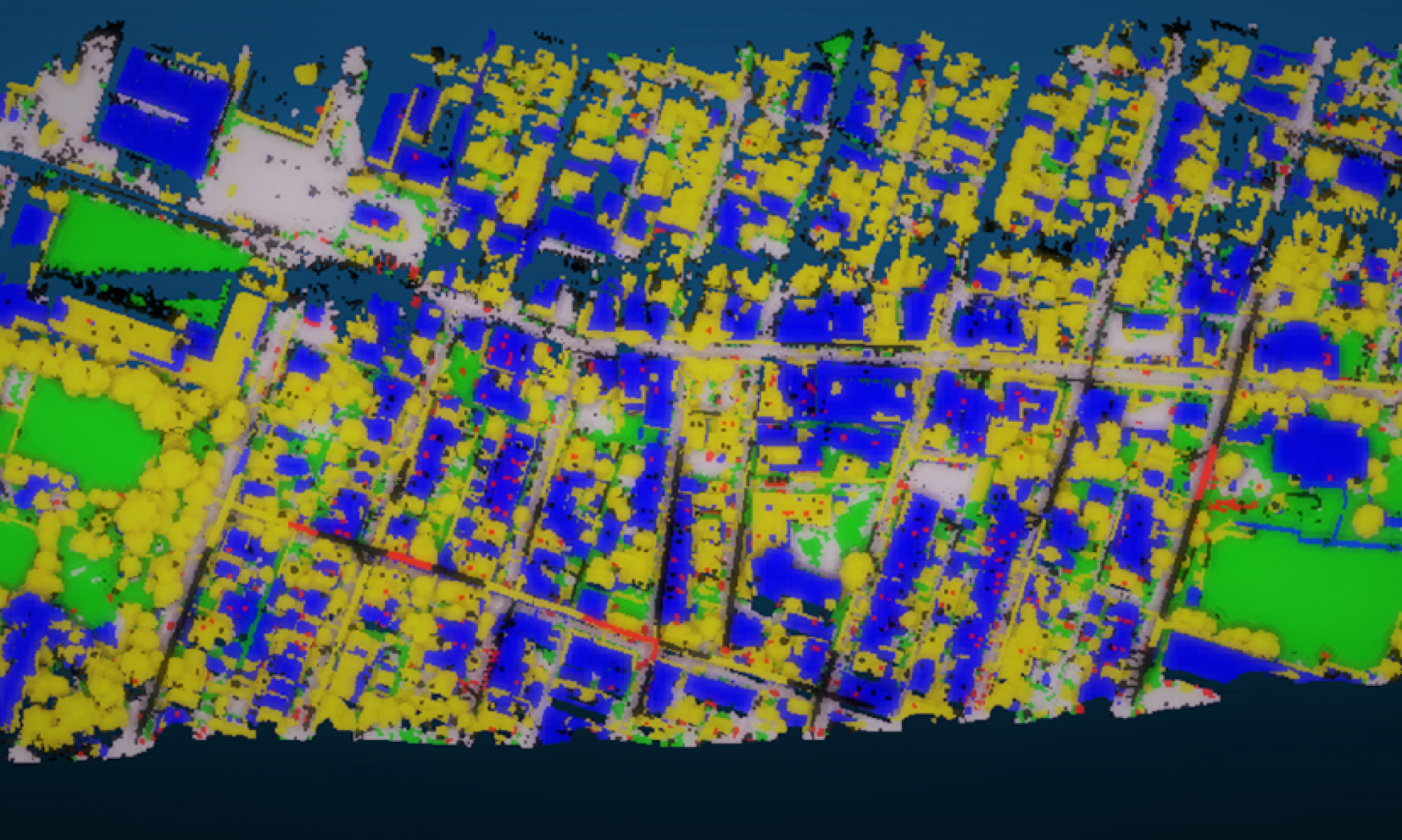
Generating risk map for Aerial Drones landing in Urban area
MSCV Capstone Project Sponsored by Near Earth Autonomy