
Arpit is a graduate student in Computer Vision at Robotics Institute, Carnegie Mellon University. He interned with Tesla Autopilot team where he worked on depth prediction. Previosly he worked with Visual Intelligence Group at Samsung Research India, Bangalore for 3 years as Lead Engineer. He is interested to work in the area of self-supervised methods in Deep Learning.
Project Responsibilities:
(a) Motion segmentation using scene-flow.
(b) Self-supervised shape completion experiments on shapenet dataset and integrating pose prediction module (IT-Net).
Zhenli was a CMU MSCV student from Aug 2019 to Dec 2020. His interests focus on computer vision and robotics. He interned in Waymo Research during the 2020 summer. He will join Nuro as a machine learning engineer after graduation in 2021.
Project Responsibilities:
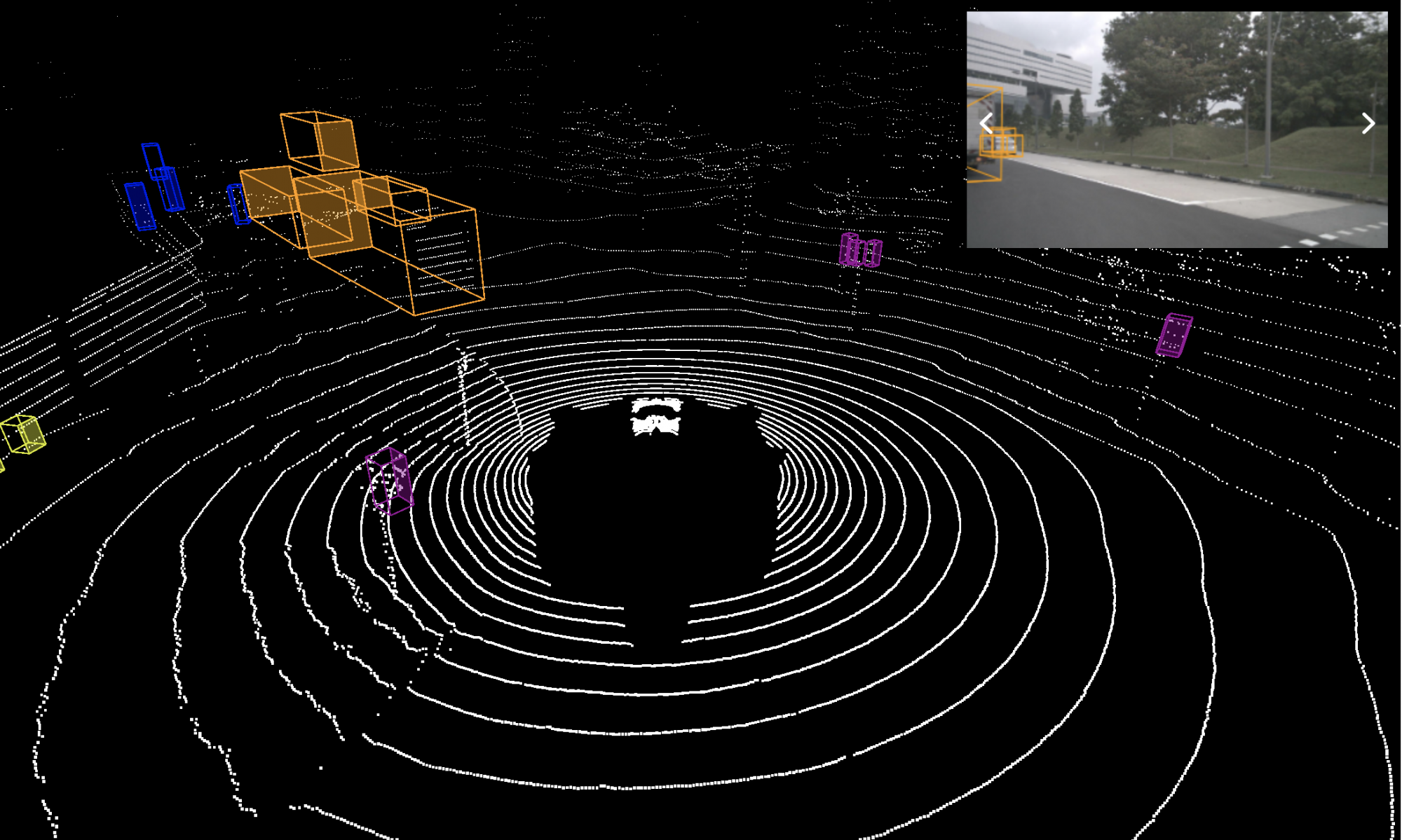
(a)Propose and try different auxiliary metric for evaluating different 3D anchor boxes to improve the classification branch of a 3D object detector.
(b)Try to use the flow to improve the orientation of bounding boxs of a 3D object detector at test time.