Robots are helping humans to automate mundane tasks. It is found with autonomous driving and indoor cleaning robots. Another daily activity where robot assistance can be of great benefit is with cooking. This can give access to healthy food daily. There are multiple teams working to achieve this goal of building a robotic kitchen, focussing on manipulation, delivery, HCI, and perception. In this project, we focussed on two major problems for the perception team.
- Detection and tracking of ingredients found in a kitchen
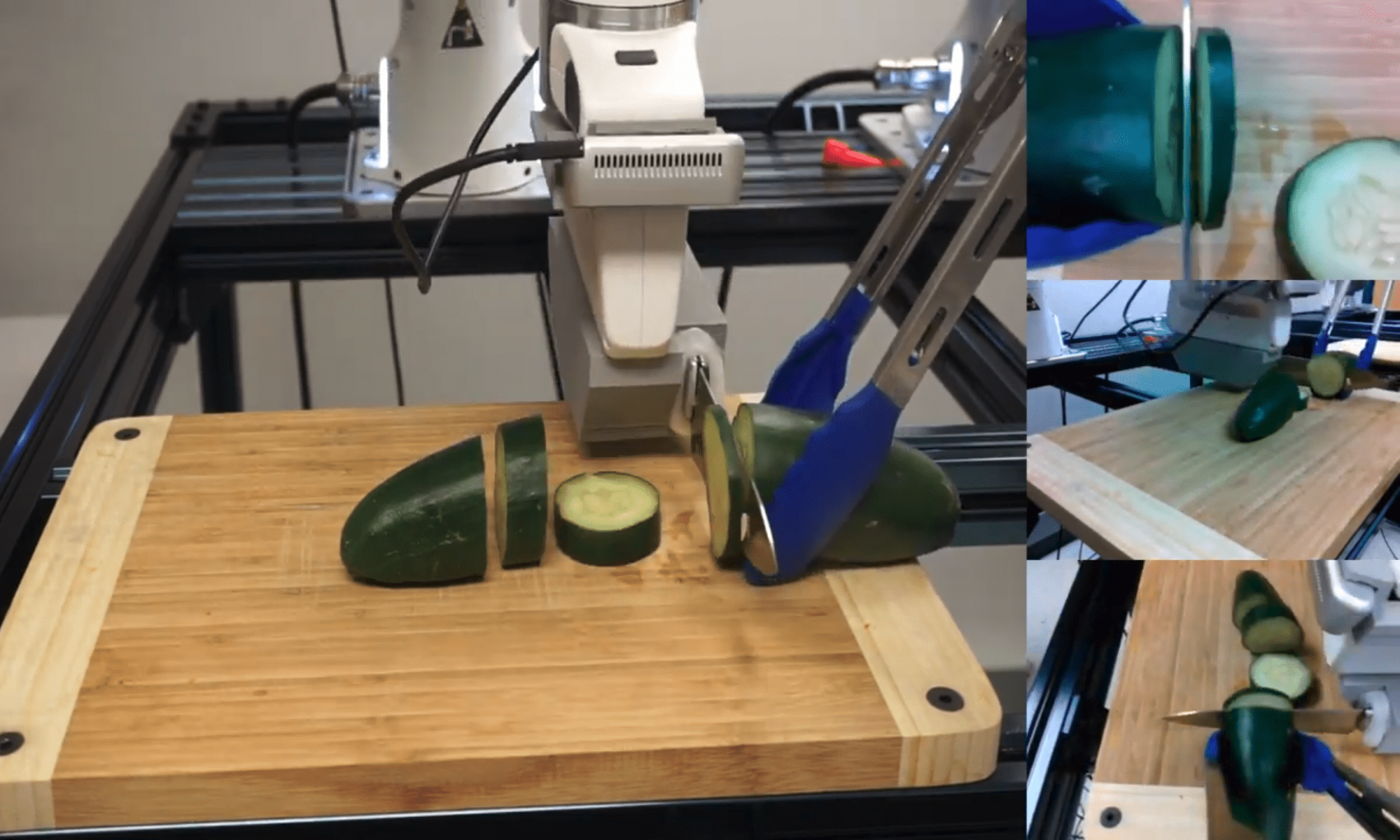
- Learning policies to manipulate these non-rigid objects