
Approach Summary:
Our approach has 3 stages:
- Image Preprocessing
- Object detection and tracking
- Vehicle pose recovery
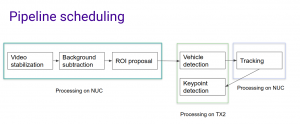
We apply the preprocessing stage to achieve the following:
- Obtain a stable video
- Identify interest regions by performing background subtraction and ROI proposal using contour detection and clustering
- The ROI proposal is also essential in partitioning the image such that it can be parallely processed by 4 TX2s available for object detections and vehicle keypoint detection
- Preprocessing happens on the NUC
Once the image has been pre-processed we perform vehicle detection and tracking. We then perform vehicle keypoint detection in the tracked boxes. Vehicle pose recovery is performed using EPnP.
The software pipeline is explained in detail on the github page
https://github.com/snlakshm/surveillance_application
and the Fall final presentation: