Qualitative Results
Single Sequence (Sparse, Unposed, 256 Gauss)
Test Views: PSNR = 21.55, SSIM = 0.79, LPIPS = 0.23

Left: Test-View Rendering | Right: Ground Truth
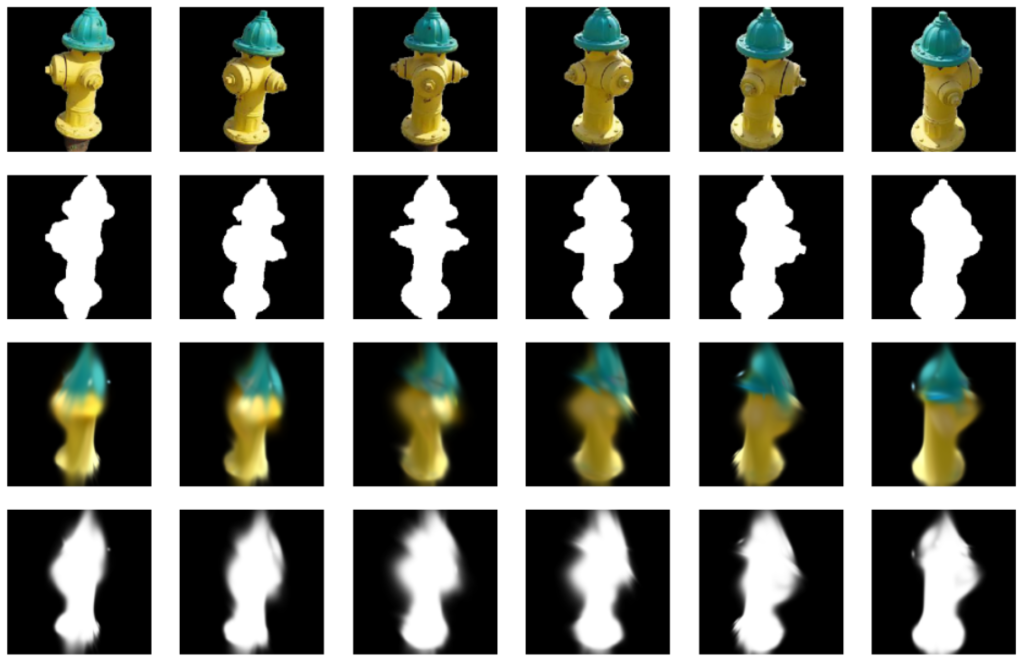
Multi Sequence (Sparse, Unposed, 256 Gaussians)
Test Views: PSNR = 14.01, SSIM = 0.65, LPIPS = 0.40
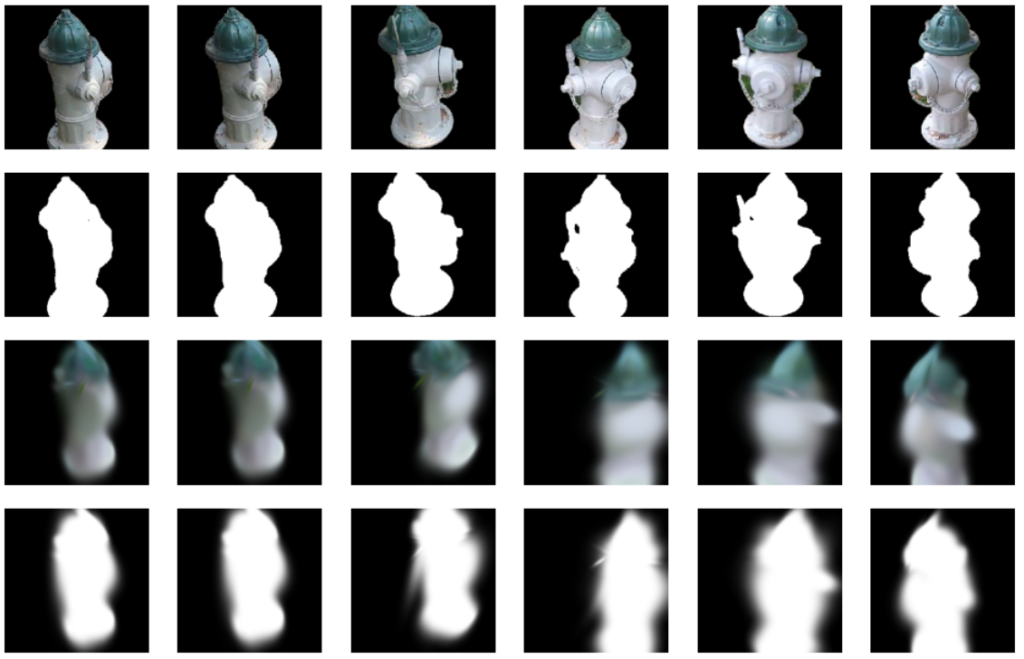
Row 1: GT RGB | Row 2: GT Mask | Row 3: Rendered RGB | Row 4: Rendered Mask
Row 1: GT RGB | Row 2: GT Mask | Row 3: Rendered RGB | Row 4: Rendered Mask
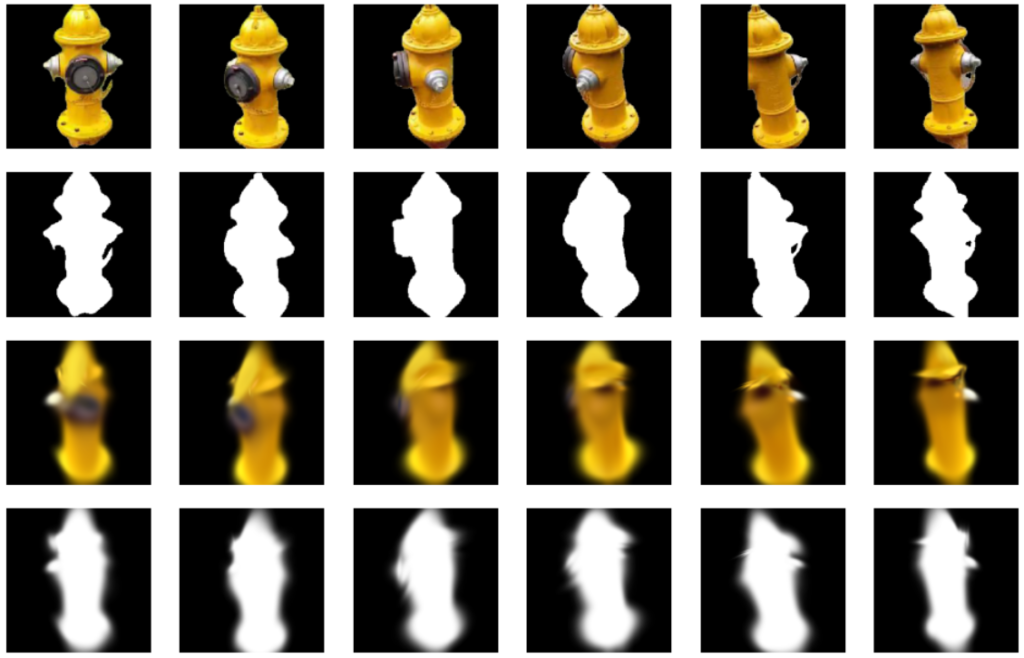
Row 1: GT RGB | Row 2: GT Mask | Row 3: Rendered RGB | Row 4: Rendered Mask
From the above results, we are able to perform nearly equivalently to vanilla 3DGS in more difficult settings with little decrease in accuracy including the most difficult setting of sparse and unposed. We also show preliminary results of our model exhibiting the ability to generalize across sequences which Vanilla 3DGS can’t do. While the results are blurry here, our experiments so far have been primarily using only 256 Gaussians. By scaling up the number of Gaussians, which we discuss in the next section, we will start seeing improved renderings for the generalizable case as well.
Quantitative Results
| Model / Metrics | PSNR | SSIM | LPIPS |
| Vanilla 3DGS Sparse | 16.69 | 0.70 | 0.33 |
| Ours Sparse + Unposed | 21.55 | 0.79 | 0.23 |
| Ours Sparse + Unposed + Generalizable | 14.01 | 0.65 | 0.40 |
Ablations
Q. What improves the performance of Gaussian Splatting?
A. Number of Gaussians


Left: 1024 Gaussians | Middle: 512 Gaussians | Right: 256 Gaussians


Left: 8192 Gaussians | Middle: 4096 Gaussians | Right: 2048 Gaussians



Left: 16k Gaussians | Middle: 32k Gaussians | Right: 64k Gaussians
We did an ablation to find out what affects the results of vanilla Gaussian Splatting as we consider it as our upper bound. We found out that the number of Gaussians has the most effect on the quality of the rendering results. Above, we do a test for an object with varying numbers of Gaussians and find that 8k Gaussians is probably the best tradeoff. We also found that this is consistent across different object categories. Thus, our future experiments will aim to scale up to this density of Gaussians to get better renderings.