Team Name
NEA
Team Members
 Chang Gao
Chang Gao
MSCV Student, CMU
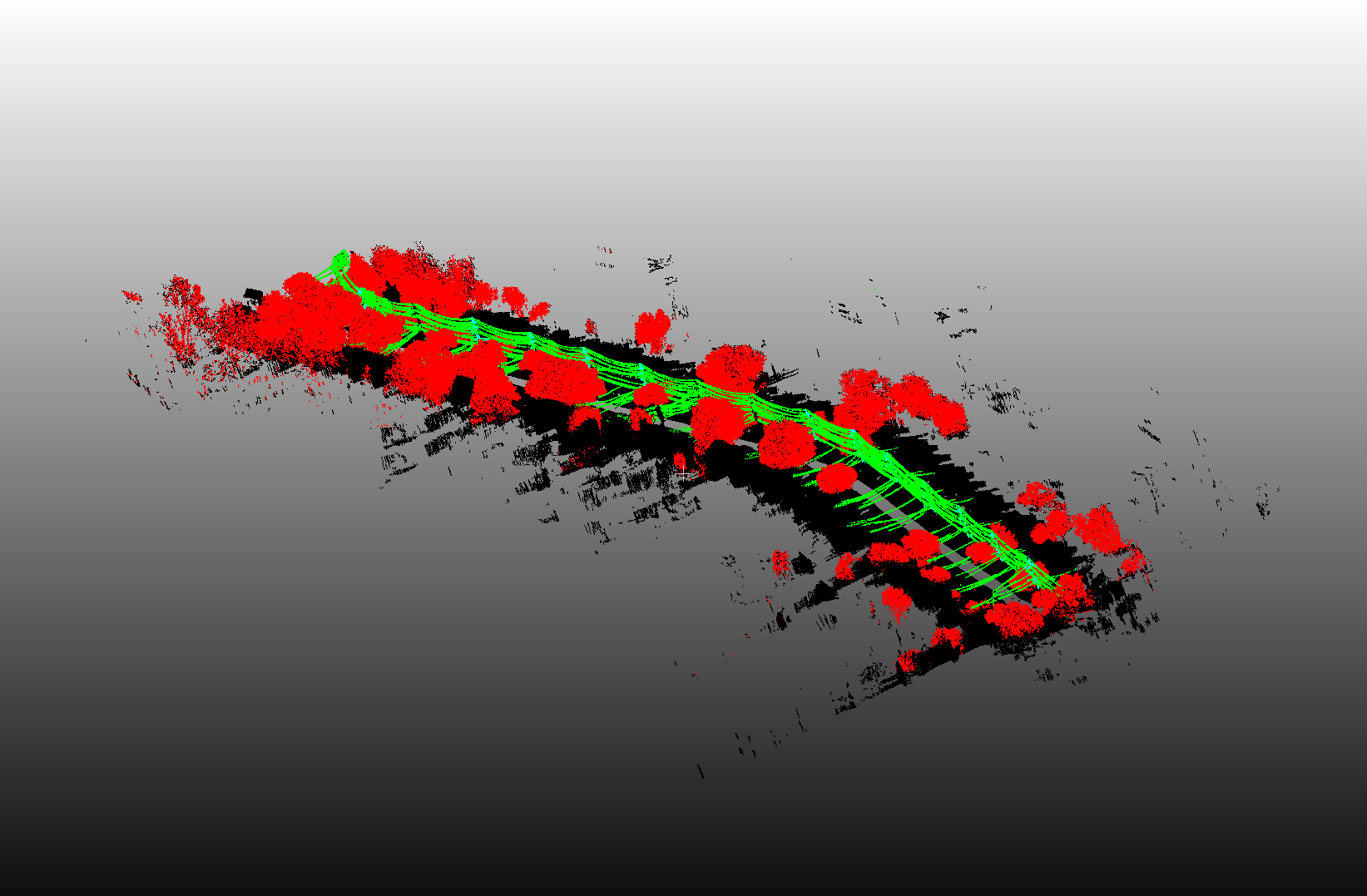
Responsibility: (1) Power lines: Develop 3D semantic segmentation pipeline (PointNet++), including training, testing, and visualization code with TensorFlow and Open3D; process point cloud data. (2) Aircraft: Develop object detection pipeline (CenterNet), including training, testing, and visualization code with Pytorch. (3) Maintain project website.
Chang is an active AI researcher specialized in deep learning and computer vision, with three years of research experience and three papers published. He is currently co-oping at Near Earth Autonomy as a computer vision engineer, and he has just finished his internship at Waymo (Google self-driving car) as a computer vision and machine learning researcher. He will return to Waymo as a software engineer in January 2020.
 Anshuman Majumdar
Anshuman Majumdar
MSCV Student, CMU
Responsibility: (1) Power lines: Develop 3D semantic segmentation pipeline (Superpoint Graphs), including training, testing, and visualization code with PyTorch and Plyfile; process point cloud data. (2) Aircraft: Initial data research; study on unsupervised methods for defect detection. (3) Maintain the GPU server.
Anshuman’s passion for research and development lies in the confluence of Computer Vision, Machine Learning (especially Deep Learning) and Artificial Intelligence, and he aspires to create intelligent systems that can perceive the world as effortlessly as humans do. He has extensive experience (over three years) in research, design, and implementation of Computer Vision and Machine Learning algorithms, on mobile platforms and servers, having worked on projects related to Detection, Tracking and Localization for Autonomous Driving, SLAM and Tracking for Augmented and Virtual Reality, General Object Detection, Tracking and Pose Estimation, Character Recognition and Analysis of Handwritten Documents, among others.
Advisor

David Held
Assistant Professor, CMU
Responsibility: Advising project.
(Following contents and profile photo are copied from David’s homepage)
I am an assistant professor at CMU in the Robotics Institute. Prior to my appointment at CMU, I worked as a post-doc at UC Berkeley with Pieter Abbeel on deep reinforcement learning for object manipulation. I completed my Ph.D. in computer science at Stanford working with Sebastian Thrun and Silvio Savarese on perception for self-driving cars. I also have a B.S. and M.S. in mechanical engineering from MIT.